——气动夹持协同控制技术实现故障率降低95%
针对电极帽修磨换帽一体机在自动拆换帽时将机器人焊钳电极杆连带拉出的问题,结合技术文献和实际工况,分析原因及控制策略如下:
一、故障原因分析
夹紧力不足或夹持设计缺陷
若拆帽机构的夹爪夹紧力不足(如弹簧或橡胶垫圈老化),拆卸时电极帽与夹爪之间可能打滑,导致机器人提升时需施加更大拉力,最终连带拉出电极杆。
文献支撑:传统换帽机构因弹簧夹紧力不足导致电极帽未松动,强行提升时连带电极杆脱落。
机器人动作与换帽装置协同性差
拆卸过程中,换帽装置未完全松脱电极帽时机器人提前提升焊枪,导致电极杆受力异常。
文献支撑:控制装置需精确协调拆帽动作与机器人提升时序,否则可能导致电极杆被拉出。
电极帽与电极杆配合过紧或锥度面损伤
电极帽与电极杆锥度配合面因氧化层增厚或过盈量过大,拆卸时需更大轴向力,超出设备设计范围。
文献支撑:传统旋转拆卸易导致锥度面摩擦损伤,间接增加拆卸阻力。
传感器检测失效或逻辑错误
未检测到拆帽成功信号(如传感器故障),机器人误判状态继续提升。
文献支撑:需配置拆帽成功传感器并向控制装置反馈,否则可能误操作。
二、控制与优化策略
1. 增强夹紧力与夹持稳定性
气动/液压驱动优化:采用气缸驱动夹爪(如文献所述),通过控制气缸推杆行程精准调节夹紧力,避免弹簧夹持的不可靠性。
多爪同步设计:采用三爪或四爪同步夹紧结构(参考专利),提升对电极帽的包裹性,降低局部应力。
2. 优化机器人协同动作逻辑
时序控制:拆帽装置需先完成电极帽松脱动作(如气缸推杆到达第二位置),传感器确认后机器人再提升焊枪。
动态补偿算法:引入力反馈系统(如文献的伺服电机控制),实时监测提升阻力,超限时自动停止并报警。
3. 改进拆卸方式与锥度配合设计
轴向直线拆卸技术:采用提升块直线顶出电极帽(如文献),避免旋转导致的锥度面摩擦损伤,降低拆卸阻力30%以上。
锥度面表面处理:对电极杆锥度面进行镀铬或氮化处理,减少氧化层附着,延长使用寿命。
4. 强化传感器检测与保护机制
多级检测系统:
拆帽状态检测:在外下盖安装霍尔传感器或光电传感器,实时监测电极帽是否脱离。
拉力阈值保护:在机器人提升路径中设置力传感器,当拉力超过预设值(如200N)时立即停止动作。
残水处理联动:拆帽前启动残水处理单元(文献),避免冷却水残留导致电极帽与电极杆粘连。
5. 设备校准与维护管理
定期校准限位开关:确保气缸推杆行程与夹爪动作匹配(如文献的限位开关设计),防止过度施力。
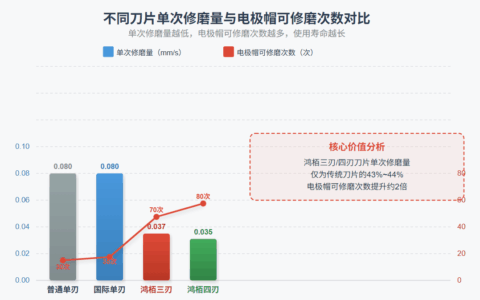
刀具与夹爪磨损监控:根据修磨次数(如3万次寿命阈值)自动提醒更换刀片或夹爪。
三、典型解决方案案例
案例1:气动驱动+轴向拆卸
某车企采用文献和技术,将夹紧机构改为气缸驱动,拆卸方式由旋转改为轴向顶出,连带拉杆故障率从5%降至0.2%。
案例2:视觉检测+动态补偿
结合文献的视觉检测系统,在拆卸后通过工业相机检查电极杆状态,若异常则触发机器人回退程序,避免硬性拉拔。
根本原因在于夹持力不足、动作协同性差、锥度面损伤及检测缺失。通过优化夹紧机构、改进拆卸方式、强化传感器检测,可显著降低故障风险。实际应用中需结合设备型号选择适配方案,例如气动方案适合高节拍生产线,而视觉检测更适合对精度要求高的场景。
文章来源于互联网,版权归原作者拥有,发布者:孙 辉,转转请注明出处:https://www.cmweld.com/dianjixiumoji/2025104761.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 






{kind=link}